We were looking at the space M of all 3 by 3 matrices. We identified some subspaces; the symmetric 3 by 3 matrices S, the upper triangular 3 by 3 matrices U, and the intersection D of these two spaces – the space of diagonal 3 by 3 matrices.
The dimension of M is 9; we must choose 9 numbers to specify an element of M . The space M is very similar to R9 . A good choice of basis is:
The subspace of symmetric matrices S has dimension 6. When choosing an element of S we pick three numbers on the diagonal and three in the upper right, which tell us what must appear in the lower left of the matrix. One basis for S is the collection:
The dimension of U is again 6; we have the same amount of freedom in selecting the entries of an upper triangular matrix as we did in choosing a symmetric matrix. A basis for U is:
This happens to be a subset of the basis we chose for M , but there is no basis for S that is a subset of the basis we chose for M .
The subspace D=S∩U of diagonal 3 by 3 matrices has dimension 3. Because of the way we chose bases for U and S , a good basis for D is the intersection of those bases.
Is S∪U, the set of 3 by 3 matrices which are either symmetric or upper triangular, a subspace of M?No . This is like taking two lines in R2 and asking if together they form a subspace; we have to fill in between them. If we take all possible sums of elements of S and elements of U we get what we call the sum S+U . This is a subspace of M . In fact, S+U=M . For unions and sums, dimensions follow this rule:
Another example of a vector space that’s not Rn appears in differential equations.
We can think of the solutions y to dx2d2y+y=0 as the elements of a nullspace. Some solutions are:
y=cosx,y=sinx,andy=eix.
The complete solution is:
y=c1cosx+c2sinx,
where c1 and c2 can be any complex numbers. This solution space is a two dimensional vector space with basis vectors cos x and sin x . (Even though these don’t “look like” vectors, we can build a vector space from them because they can be added and multiplied by a constant.)
Now let M be the space of 5×17 matrices. The subset of M containing all rank 4 matrices is not a subspace, even if we include the zero matrix, because the sum of two rank 4 matrices may not have rank 4.
In R4 , the set of all vectors v=v1v2v3v4 for which v1+v2+v3+v4=0 is a subspace. It contains the zero vector and is closed un der addition a nd scalar multiplication. It is the nullspace of the matrix A=[1111] . Because A has rank 1, the dimension of this nullspace is n−r=3 . The subspace has the basis of special solutions:
−1100,−1010,−1001.
The column space of A is R1 . The left nullspace contains only the zero vector, has dimension zero, and its basis is the empty set. The row space of A also has dimension 1.
The rank of a matrix is the dimension of its column (or row) space. The matrix
A=[1248510]
has rank 1 because each of its columns is a multiple of the first column.
A=[12][145].
Every rank 1 matrix A can be written A=UVT. , where U and V are column vectors. We’ll use rank 1 matrices as building blocks for more complex matrices.
In this class, a graph G is a collection of nodes joined by edges:
G={nodes,edges}.
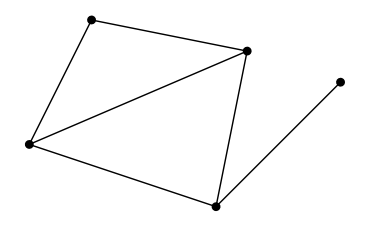
A typical graph appears in Figure 1. Another example of a graph is which each node is a person. Two nodes are connected by an edge if the people are friends. We can ask how close two people are to each other in the graph – what’s the smallest number of friend to friend connections joining them? The question “what’s the farthest distance between two people in the graph?” lies behind phrases like “six degrees of separation” and “it’s a small world”.
Figure 1: A graph with 5 nodes and 6 edges.
Another graph is the world wide web: its nodes are web sites and its edges are links.
We’ll describe graphs in terms of matrices, which will make it easy to answer questions about distances between nodes.
Problem 11.1: [Optional] (3.5 #41. Introduction to Linear Algebra: Strang) Write the 3 by 3 identity matrix as a combination of the other five permutation matrices. Then show that those five matrices are linearly independent. (Assume a combination gives c1P1+⋯+c5P5=0 and check entries to prove ci is zero.) The five permutation matrices are a basis for the subspace of three by three matrices with row and column sums all equal.
So c1=c2=c3=0 along the diagonal, and c4=c5=0 from the offdiagonal entries.
Problem 11.2: (3.6 #31.) M is the space of three by three matrices. Multiply each matrix X in M by:
A=1−1001−1−101
Notice that A111=000.
a) Which matrices X lead to AX=0?
b) Which matrices have the form AX for some matrix X?
c) Part (a) finds the “nullspace” of the operation AX and part (b) finds the “column space.” What are the dimensions of those two subspaces of M? Why do the dimensions add to (n−r)+r=9?
Solution
a) We can use row reduction or some other method to see that the rows of A are dependent and that A has rank 2. Its nullspace has the basis:
111.
AX=0 precisely when the columns of X are in the nullspace of A , i.e. when they are multiples of the basis of N(A) . Therefore, if AX=0 then X must have the form:
X=aaabbbccc.
b) On the other hand, the columns of any matrix of the form AX are linear combinations of the columns of A . That is, they are vectors whose components all sum to 0, so a matrix has the form AX if and only if all of its columns individually sum to 0:
AX=BifandonlyifB=ad−a−dbe−b−ecf−c−f.
c) The dimension of the “nullspace” is 3, while the dimension of the "column space" is 6. These add up to 9, which is the dimension of the space of “inputs” M.